展位号:C501 & A106
展区位置:北京北人亦创国际会展中心
时间:2025年8月8日-8月12日
2025世界机器人大会(WRC 2025)正在北京举行。作为全球机器人与具身智能领域的重要展示平台,本届大会聚焦智能机器人、机器人应用场景拓展关键技术突破等,汇聚了来自科研、产业与技术前沿的代表性成果。在WRC 2025世界机器人大会的展厅中,灵初智能以真实、多样的任务演示,吸引着一波又一波观众驻足。

麻将桌上,机器人与三位真人持续对战,机器人双手协同、自主碰杠;打包区域,机器人接收自然语言指令后自动完成商品识别与封装;配送模拟场景中,机器人接受下单指令,便可自主进行打包、提袋、配送,完成“最后一百米”的全流程交付。作为具身智能领域领军企业,灵初智能在本届大会上,聚焦三大核心场景,全面展示其长程、灵巧能力的突破。应用覆盖零售物流、泛工业、展示娱乐等多个领域,展现了从数据、模型算法、硬件到场景应用的完整技术链条。

图注:灵初智能亮相WRC 2025
三大场景展示具身智能长程、灵巧能力突破
由灵初自研的分层端到端VLA模型与强化学习算法体系提供驱动支撑,本次灵初智能展出的场景Demo均源于真实客户需求与落地任务验证,覆盖长程复杂任务、开放场景操作、通用泛化性抓取等具身智能落地过程中的关键挑战:

图注:灵初智能亮相WRC 2025
1. 麻将机器人:开放环境下的长程复杂任务
灵初智能麻将机器人与现场观众同桌博弈的场景吸引了众多参观者围观。机器人可与现场观众共同完成30分钟以上的连续麻将对局,以毫米级精度完成摸牌、放置、碰杠等复杂操作,在与人类玩家的实时博弈中展现策略思考,动态构建决策链,自主完成碰杠等博弈决策。观众不仅可以现场观看,更能亲自上桌与机器人对弈,体验机器人如何融合视觉、语言与动作信息,形成游戏博弈和具身操作的融合,展示真正意义上的"会思考的手"。

图注:机器人与现场观众共同完成30分钟以上的连续麻将对局
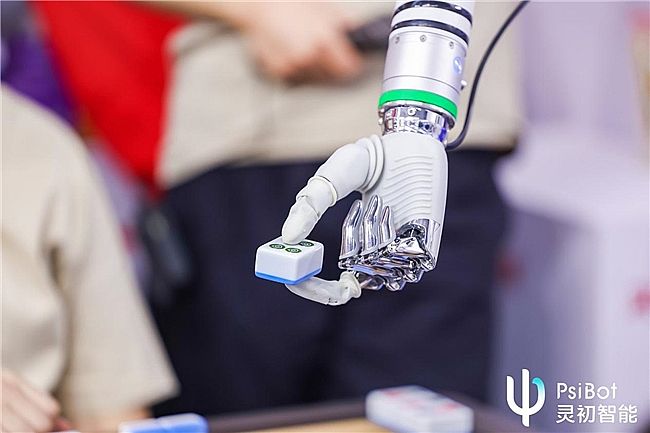
图注:机器人自行抓牌和打牌、完成碰杠等博弈决策
2. 自主打包任务:胜任商品级泛化、工具使用、柔性物体操作
从博弈场景转向实用应用,展会现场的零售打包演示区展现了灵初智能在商业场景中的技术实力。机器人仅接收"将桌面物品打包"的自然语言指令,便可自主分析商品排列、确定操作顺序、完成扫码与装袋动作。整个流程基于VLA模型的分层架构:上层大模型负责理解任务并规划顺序,下层强化学习控制器负责执行动作细节,支持商品级泛化与实时调整,无需逐一标注或人工干预。
图注:自主完成扫码打包泛化抓取的全流程
3. 解决复杂柔性物体操作:打通配送机器人“最后一百米”
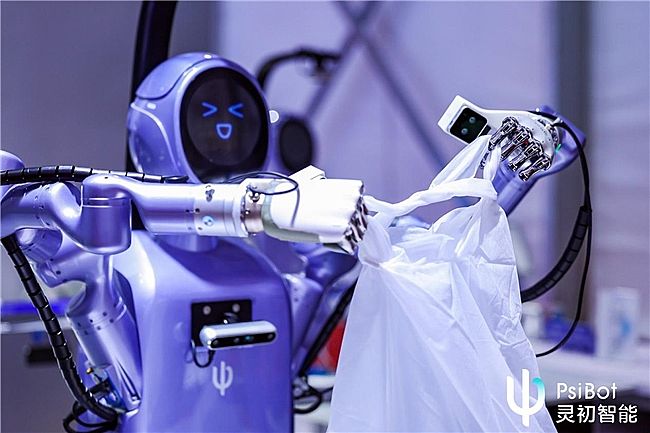
在物流配送应用展示中,灵初智能外卖配送机器人演示了"最后一百米"配送难题的解决方案。面对快递袋、纸袋等多样化、易变形的配送物体,机器人精准识别不同形态与摆放姿态,灵巧手如人手般灵活穿过提环并稳固握紧,凭借强大的泛化性和动态性能,还能对变形物体进行处理,无论何种规格、轻重的袋子都能安全稳定地提起。整个过程实现端到端的自动化操作,无需人工干预。在实际配送场景中,该机器人能够自主导航至目标位置,灵活避开行人和障碍物,配备7自由度机械臂和6自由度灵巧手,能够处理3kg负载的配送任务,为外卖、物流配送场景提供了完整的智能化解决方案。

图注:灵巧手如人手般灵活穿过提环并稳固握紧

图注:机器人自主导航,完成配送任务
技术路径回归任务本质:从模型到任务链的闭环协同
1. 陈源培:
在“AI大模型赋能机器人与具身智能产业新范式”论坛中,灵初智能联合创始人陈源培发表了主题演讲《迈向通用具身灵巧操作新纪元》,回顾了灵巧操作的发展历程,并展望了未来的合作方向。
他指出,具身智能的发展可以从四个核心环节理解——本体、场景、数据与算法,这些环节彼此循环影响。“算法不仅依赖硬件,也可以反过来定义硬件,比如决定一只灵巧手需要怎样的结构与指标。”
在算法水平上,他将当前能力分为四个层级:从以CV方法实现的固定动作自动化,到具备一定泛化性的模仿学习,再到能够处理长程任务和高成功率的VLA+强化学习。“我们一开始就瞄准了L3——长程性和灵巧性,这里正是VLA与强化学习的结合点。”
谈及VLA技术,陈源培分享了灵初提出的分层“大脑—小脑”架构,并补充道:“关键不只是端到端,而是如何做长程任务,以及如何把强化学习融入进去。”在这一架构中,上层Planner通过思维链(CoT)选择合适的任务,下层Controller负责精细执行,通过Action Token实现上下层的高效衔接,使长程任务“丝滑”串联,成功率显著提升。

他还介绍了灵初在长程任务训练中的创新方法——上下优化框架。以搭乐高为例,将“翻找—转向—抓取—插入”四个技能在仿真中用强化学习分别训练,再通过上下层协同优化,解决了任务衔接中初始状态不匹配的难题,实现了多物体、多形态下的稳定泛化。
数据策略方面,陈源培提出了“互联网数据—仿真数据—真实数据—真机数据”的四层体系,并特别强调引入高价值的人手双手灵巧操作数据。“人手和灵巧手的形态与操作最接近,gap最小。通过强化学习优化,人类的数据可以高效迁移到机械手上。”这一方法将物体目标轨迹转化为统一的奖励函数,使RL能够训练出多样化的灵巧操作,并顺利从仿真迁移到真机。
“我们做灵巧手,不只是为了一个任务,而是为了最终走向通用具身智能。”陈源培表示,硬件会做到极致的性价比,从ToB场景切入,积累数据与模型,最终提升跨场景的泛化能力,为ToC规模化落地奠定基础。

2. 黄贝宁:
在“AI大模型赋能机器人与具身智能产业新范式”论坛的《机器人与具身智能应用场景创新与产业链协同》圆桌上,灵初智能副总裁黄贝宁结合公司在 VLA 驱动的麻将机器人实践,分享了对当前及未来具身智能发展的观察。
他首先谈到,虽然“VLA”已成为业内热词,但现实中能够完整、深度体验其价值的机会并不多:“很多演示只展示了很短的过程,以至于观众看不出 VLA 在其中发挥了什么作用,甚至不清楚到底哪个环节是 VLA 做的。”为此,灵初做了一个“完全用 VLA 实现的麻将机器人”作为探索。黄贝宁介绍,这一机器人通过大模型视觉感知识别牌桌布局,推理出抓牌、出牌策略,并在博弈过程中实时输出思维链——包括当前手牌、对手出牌情况以及最优行动判断。“和传统棋牌机器人不同,这个机器人会让你真切感受到它在‘想’。”
在现场演示中,三位真人玩家与机器人同桌对弈,通过语音和肢体动作进行自然互动。“我要碰”“我胡了”等口令,配合出牌、弃牌的肢体动作,让人获得一种不同于传统棋牌机器人演示的沉浸体验。黄贝宁指出,这一小小的麻将场景,实际上涵盖了具身智能的多项关键能力:双臂、双灵巧手的动作控制,语音交互,表情展示,以及实时推理与执行。“我们甚至考虑过,如果机器人有‘皮肤’和更拟人的表情,会让互动体验更好。”

展望未来趋势,他认为,VLA 驱动的应用会出现在越来越多的场景中,让更多人感受到它与传统技术的差异。同时,行业的最终目标是“实现通用的、能做各种事的机器人”,这意味着需要将双臂、灵巧手、语音、触觉、力控等多种能力集成在一个本体中。
“现在各家的机器人都各具特色,但没有一台能把市面上所有机器人的能力集成到一起。”黄贝宁表示,“未来最应该做的,是把各个环节的突破性技术集成起来,形成真正综合的能力。”

真正的具身智能,始于长程灵巧
本次WRC展示的技术成果背后,体现了灵初智能在具身智能领域的深厚积累。当整个行业还在L1泛化抓取阶段徘徊时,灵初智能已经突破了L2灵巧操作的行业分水岭,并在L3长程灵巧操作领域建立了领先地位。公司发布的Psi R1模型首次实现30分钟连续麻将博弈,展现了机器人在开放环境下处理复杂任务的突破性能力,这标志着具身智能从简单动作执行向真正的认知决策和长程操作的关键跃迁。
作为具身智能的领军者,灵初智能构建了完整的四大支柱技术生态:仿真+真实数据的特数据金字塔、基于CoAT(Chain of Action Thought)框架的VLA模型、极致稳定与性价比的硬件整机(带有21个自由度的自研灵巧手),以及从制造到物流的全场景落地验证及数据回环。这四大支柱协同作用,让灵初智能能够为制造业、零售业、物流业等客户提供真正可规模化的具身智能解决方案。
诚邀各界伙伴在WRC 2025期间,莅临灵初智能 C501 和 A106 展位,共同探讨具身智能技术的无限可能。
关于灵初智能
灵初智能(PsiBot),作为国内具身智能科技领域的领军企业,专注深耕通用具身智能、VLA大模型以及灵巧操作算法等前沿技术。公司的核心团队成员均来自顶尖高校的 AI 实验室以及头部科技企业,汇聚了行业内的顶尖人才。 凭借深厚的技术积累与创新能力,灵初智能成功推出了行业内首个分层端到端强化学习具身模型 Psi R0、R0.5及R1,成为行业内率先实现长程任务的具身模型研发企业,并且兼具泛化性、鲁棒性、灵巧性。该成果获得了行业头部客户的高度认可,目前,灵初智能正全力加速推进相关技术的商业落地进程,引领具身智能技术迈向新的发展阶段。





 明基投影机
明基投影机 坚果投影机
坚果投影机 科视投影机
科视投影机 极米投影机
极米投影机 SONNOC投影机
SONNOC投影机 宝视来投影机
宝视来投影机 视美乐投影机
视美乐投影机 当贝投影机
当贝投影机 哈趣投影机
哈趣投影机 WAP手机版
WAP手机版 建议反馈
建议反馈 官方微博
官方微博 微信扫一扫
微信扫一扫